AKARIの特徴
ここでは、AKARIの特徴を紹介します。
小型で使いやすい卓上カメラロボット
AKARIは、卓上に置ける小型サイズのロボットです。
機能も大変シンプルで、
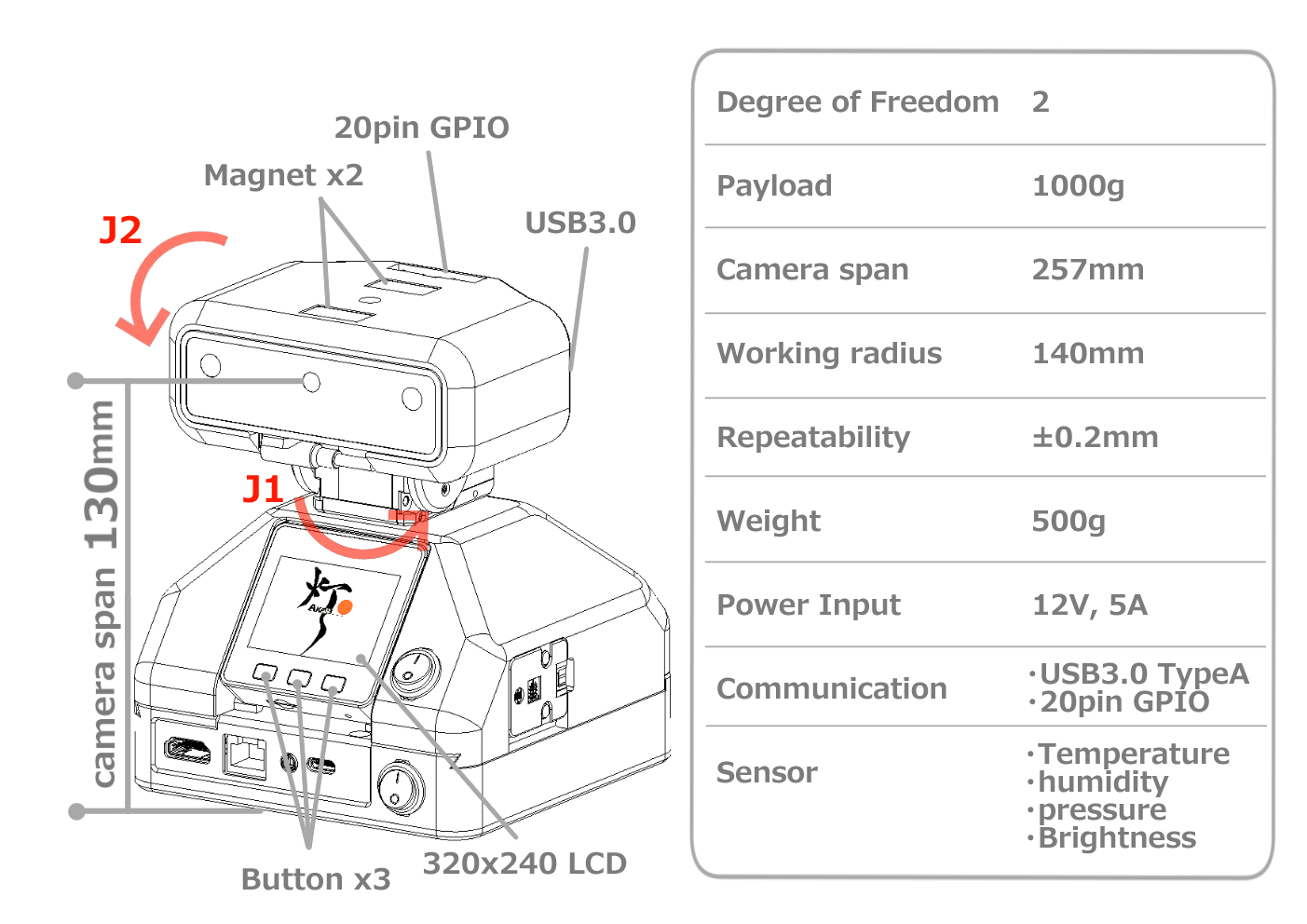
・ カメラのついたヘッドが上下左右の2方向に動かせられる
・ ボディーに搭載されたディスプレイ(M5Stack)に文字や画像が表示できる
・ ボタン入力や環境センサの情報が取得できる
・ ヘッドのGPIOが制御でき、センサなどがモジュールとして追加できる
のみで、 簡単に使い方を覚えることができます。
AIカメラを搭載!ロボット単体でも多様な画像認識が使える
カメラにはステレオAIカメラである OAK-D Lite を採用しています。
カメラに推論を行うことができる演算機能が搭載されており、小型なAKARI単体でも 顔認識・物体認識はもちろん、セグメンテーションや骨格推定など様々な画像認識を使うことも可能です。
またステレオカメラを活かしたデプス推定を行うことも可能です。
AKARIに組み込まれたサンプルの他にもOAK-Dの開発元であるLuxonisからも多くのサンプルが公開されており、幅広い画像認識技術を簡単に試すことができます。
機能を拡張して使える!
AKARIは ヘッドにユニットを追加したり、ベース部を付け替えて使うこともできます。
ヘッドにはUSBポートとGPIOが付いており、センサや出力モジュールを追加することができます。
画像認識+αのオリジナル機能を開発したい! といった場合にすぐに試すことができます。

webブラウザ上からソフトを書いて動かせる!
AKARIには本体のPC上のUbuntuから直接プログラムの開発、実行を行う方法の他に、webブラウザ経由でアクセスして開発が行えるwebコンソールを使うことができます。
AKARI本体のPCからだけでなく、 同一ネットワークに接続されている別のPCやタブレットからアクセスして、JupyterLab上でプログラミングし、AKARIを動かしたり、カメラ映像や認識結果を取得することができます。
これによって、 Linuxの知識がなくても簡単・手軽にプログラミングの勉強や開発を始めることができます。


ロボット学習のコンテンツが充実!
AKARIのハード、ソフトの仕様は本マニュアルにて詳しく公開されています。
また、AKARI本体の組み立て方やソフトのセットアップ方法、使い方の手順も記載されています。
更に、AKARIの開発をする上でのソフトの書き方を紹介したチュートリアル用のJupyter NotebookやAKARIを動かしながらPythonが学習できる練習問題集も公開されており、 初めてロボットを使ったプログラミングに挑戦する方にも、勉強しやすい環境が整っています。
完全オープンソース
ハードの設計やベースとなるソフト、はオープンソース化されています。
ソフトはApache2.0、ハードはCC BY 4.0のライセンスで公開されています。
各ライセンスの規約に従ってさえいれば、使うのも、改変するのも自由です。